
The
goal of
this project is to conceive and test a new architecture for a post-IP
environment. This post-IP architecture is mainly based on virtual
networking
with a piloting system able to cope with the constraints. This
architecture is
intelligence-oriented using mechanisms coming from Multi-Agent systems.
The reason of this new architecture comes from the limits of the current Internet architecture in a large number of environments like wireless networks, sensor networks or RFID networks. For example, one of the main TCP/IP drawbacks in wireless sensor networks is energy consumption. In mobile networks, the bit error rate and the delay are generally a source of problems for TCP/IP. Fortunately, the TCP/IP protocols are very open and a large number of parameters may be optimized. The best values of these parameters are dependent on the context, the type of the application and the SLAs (Service Level Agreement) of the customers.
An example of a piloting system would be on a sensor soon out of battery. In this case, the routing tables have to be modified to avoid going through this sensor. So, the idea is to define the algorithms (routing, QoS, security, energy, mobility, etc.) as a function of the context. This solution permits the network to be scalable. To reach this goal, an autonomic-oriented architecture will be proposed to support a self-organized, selfcontrol and self-secure architecture. This architecture is based on a new plane: the piloting plane that will help to choose the best parameters to optimize the behaviour of the network. Indeed, the autonomicoriented architecture will associate to each network equipment (router, box and so on) a situated view that will be used to determine the context and to choose and optimize control algorithms and parameters.
Another very important concept for post-IP networking we are proposing to use in this project is network virtualization to abstract networks as virtual domains (slice/susbtrate). A virtual domain can represent a coherent functional group of instances of virtual routers rather than physical routers. In this dynamic multistack network, multiple virtual networks co-exist on top of a shared substrate. These domains will use the piloting system to distribute physical resources and determine what virtual network is to be used by a customer. This will allow a service provider to simultaneously run multiple end-to-end services with different qualities of service and different securities. Virtual networks can be created and dropped when necessary.
The piloting system can also be in charge of local optimization within each virtual networks but this is not the goal of this project. Here, the piloting system and the virtualization scheme will permit a much better use of physical resources of the network bringing adapted networks to the customers.
This proposal will build a complete piloting plane for the control of the virtualization environment in order to fulfil these requirements. Self-piloting is used to facilitate continuous tuning of the virtual networks, adaptation to unpredictable conditions, prevention and recovery from failures and provision of a dependable network environment. The self-piloting scheme is realized by feeding control algorithms with the best available information. The goal of the piloting plane is to get in a concerted way the knowledge necessary to optimize creation and destruction of virtual networks and the distribution of the physical resources. The solution under study in this proposal is envisaged as an optimized network and service layer solution, which guarantees built-in, automated piloted security, QoS, reliability, robustness, context, access, service support, self-management, and self control of the communication resources and services.
The dynamic multi-stack network will be realized by the successful cooperation of the following activities: virtualization, autonomic control principles and a piloting system. Therefore, the project Horizon suggests a transition from a static mono-stack Internet to a dynamic multi-stack network, controlling resources and securing the network by applying virtualization and piloting solutions as depicted in Figure 1.
As a summary, in this project, we want to propose a new post-IP architecture using a piloting plane and a virtual networking environment. To tackle this challenge, we propose to use the paradigm of Multi-Agent Systems (MAS) as a modelling foundation. Multi-agent systems capture in some uniform framework human users as well as artificial agents (assistants, problem solvers, distributed planning, distributed learning…) and their various types of interaction and coordination. The multi-agent paradigm seems to be particularly attractive to build an automatic piloting system, due to some intrinsic properties of agents, such as autonomy, proactivity, adaptability, cooperating, and mobility. Moreover, the notions of agents and organizations and their decentralized and pro-active nature match well the requirements of large-scale pervasive computing environments.
The reason of this new architecture comes from the limits of the current Internet architecture in a large number of environments like wireless networks, sensor networks or RFID networks. For example, one of the main TCP/IP drawbacks in wireless sensor networks is energy consumption. In mobile networks, the bit error rate and the delay are generally a source of problems for TCP/IP. Fortunately, the TCP/IP protocols are very open and a large number of parameters may be optimized. The best values of these parameters are dependent on the context, the type of the application and the SLAs (Service Level Agreement) of the customers.
An example of a piloting system would be on a sensor soon out of battery. In this case, the routing tables have to be modified to avoid going through this sensor. So, the idea is to define the algorithms (routing, QoS, security, energy, mobility, etc.) as a function of the context. This solution permits the network to be scalable. To reach this goal, an autonomic-oriented architecture will be proposed to support a self-organized, selfcontrol and self-secure architecture. This architecture is based on a new plane: the piloting plane that will help to choose the best parameters to optimize the behaviour of the network. Indeed, the autonomicoriented architecture will associate to each network equipment (router, box and so on) a situated view that will be used to determine the context and to choose and optimize control algorithms and parameters.
Another very important concept for post-IP networking we are proposing to use in this project is network virtualization to abstract networks as virtual domains (slice/susbtrate). A virtual domain can represent a coherent functional group of instances of virtual routers rather than physical routers. In this dynamic multistack network, multiple virtual networks co-exist on top of a shared substrate. These domains will use the piloting system to distribute physical resources and determine what virtual network is to be used by a customer. This will allow a service provider to simultaneously run multiple end-to-end services with different qualities of service and different securities. Virtual networks can be created and dropped when necessary.
The piloting system can also be in charge of local optimization within each virtual networks but this is not the goal of this project. Here, the piloting system and the virtualization scheme will permit a much better use of physical resources of the network bringing adapted networks to the customers.
This proposal will build a complete piloting plane for the control of the virtualization environment in order to fulfil these requirements. Self-piloting is used to facilitate continuous tuning of the virtual networks, adaptation to unpredictable conditions, prevention and recovery from failures and provision of a dependable network environment. The self-piloting scheme is realized by feeding control algorithms with the best available information. The goal of the piloting plane is to get in a concerted way the knowledge necessary to optimize creation and destruction of virtual networks and the distribution of the physical resources. The solution under study in this proposal is envisaged as an optimized network and service layer solution, which guarantees built-in, automated piloted security, QoS, reliability, robustness, context, access, service support, self-management, and self control of the communication resources and services.
The dynamic multi-stack network will be realized by the successful cooperation of the following activities: virtualization, autonomic control principles and a piloting system. Therefore, the project Horizon suggests a transition from a static mono-stack Internet to a dynamic multi-stack network, controlling resources and securing the network by applying virtualization and piloting solutions as depicted in Figure 1.
As a summary, in this project, we want to propose a new post-IP architecture using a piloting plane and a virtual networking environment. To tackle this challenge, we propose to use the paradigm of Multi-Agent Systems (MAS) as a modelling foundation. Multi-agent systems capture in some uniform framework human users as well as artificial agents (assistants, problem solvers, distributed planning, distributed learning…) and their various types of interaction and coordination. The multi-agent paradigm seems to be particularly attractive to build an automatic piloting system, due to some intrinsic properties of agents, such as autonomy, proactivity, adaptability, cooperating, and mobility. Moreover, the notions of agents and organizations and their decentralized and pro-active nature match well the requirements of large-scale pervasive computing environments.
Vertical
to Horizontal Transition
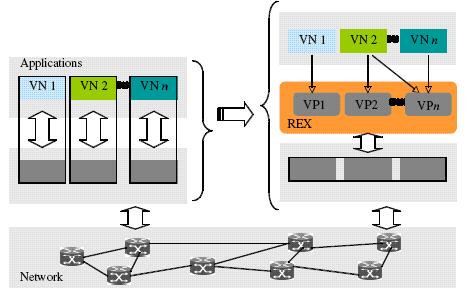
VN Virtual
Network
Fig. 1. Virtualization and Self-Piloting Approach
The
convergence of the Internet, communications, services, and information
technologies with techniques coming from Multi-Agent systems has placed
wireless networks, very high capacity networks, RFIDs and sensor
technology at
the beginning of a period of major growth. Emerging post-IP schemes
will be
used to increase the performance of the network by a self-piloting
system able
at each instant to optimize the utilization of resources.